For decades researchers have worked to design robotic hands that mimic the dexterity of human hands in the ways they grasp and manipulate objects. However, these earlier robotic hands have not been able to withstand the physical impacts that can occur in unstructured environments. A research team has now developed a compact robotic finger for dexterous hands, while also being capable of withstanding physical impacts in its working environment.
The team of researchers from Harbin University of Technology (China) published their work in the journal Frontiers of Mechanical Engineering on October 14, 2022.
Robots often work in environments that are unpredictable and sometimes unsafe. Physical collisions cannot be avoided when multi-fingered robotic hands are required to work in unstructured environments, such as settings where obstacles move quickly or the robot is required to interact with humans or other robots. The energy generated by these impacts can damage the hardware systems of the robotic hands. The current dexterous hands are rigid and therefore can be easily damaged by physical impacts and collisions. There is a need for robots equipped with sturdy, dexterous hands that can withstand physical impacts. The research team worked to create a robotic finger that could mimic the human finger in dexterity and also in its ability to absorb and withstand physical impacts.
“This will enable the dexterous hand to have better mechanical robustness, thus solving the problem that the rigid driven dexterous hand is easily damaged by physical collisions in unstructured environments,” said Yiwei Liu, a professor at the Harbin Institute of Technology, China.

Current technology involving robotic hands uses a variable stiffness actuator system. These systems are designed to make the robotic hand’s dexterous characteristics possible. In the human body, the muscles’ natural stiffness and flexibility varies depending on the task at hand. The variable stiffness actuators work to bring human-like flexibility and stiffness adjustment to the robotic hand, depending on the task to be performed.
The variable stiffness actuator is driven by two actuators. This means the robotic hand system must have two sets of decelerators, actuation devices, and sensors. Because the variable stiffness actuator’s complexity, weigh and volume are all increased, it is not useful as a solution in creating the compact dexterous hand.
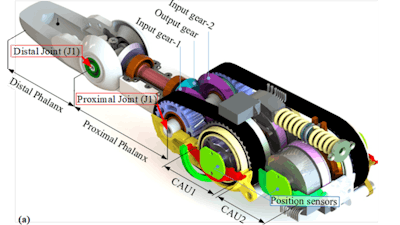
To overcome these challenges, the research team developed an antagonistic variable stiffness finger mechanism. This finger is based on gear transmission that tends to be more reliable and easier to manufacture and maintain than the current cable-driven dexterous hands. The mechanically robust finger is based on the concept of mechanical passive compliance, where the contact forces between a robotic manipulator and a stiff environment are controlled. The mechanical finger can absorb physical impacts while also possessing the ability to adjust its stiffness, depending on the requirements of the task it is performing. The advantage of this finger mechanism is that it provides an adjustable stiffness function and a very compact structure without the weight and complexity of additional actuators.
The finger prototype developed by the team weighs 480 grams and is fabricated with alloy material and 3D printed material. The team carried out a series of grasping and manipulation tests on the finger. They used a variety of typical objects – cylindrical objects, rectangular objects, and spherical objects – of different sizes to test the finger’s grasping capability.
Their finger mechanism has proven to be robust in withstanding physical impacts while also performing well for power, grasping, and manipulation.
Looking ahead to future research, the team plans to improve the finger’s stiffness adjustment range, while also working to make it more compact in size and weight. The ultimate goal is the design and fabrication of a complete dexterous hand. “This research is of great importance to improving the manipulation level of dexterous hands in unstructured environments or physical interacting tasks,” said Prof. Liu.
The research team includes Handong Hu, Yiwei Liu, Zongwu Xie, Jianfeng Yao, Hong Liu who work in the State Key Laboratory of Robotics and System, Harbin Institute of Technology, China.
This research was funded by the National Key R&D Program of China and the Major Research Plan of the National Natural Science Foundation of China.